
A research group led by Prof. XU Tiantian from the Shenzhen Institute of Advanced Technology (SIAT) of the Chinese Academy of Sciences and their collaborators have proposed a magnetically controlled guidewire robot system (MCGRS) with magnetically active steering and autonomous propulsion capabilities.
The study was published in Advanced Intelligent Systems on Aug. 31.
Vascular interventional surgery is an operation technique that utilizes guidewires, catheters and other instruments to diagnose and treat via the vascular route under the guidance of medical imaging equipment. However, this surgery requires a high level of experience from physicians, and they need to observe the position of the guidewire under contrast, suffering from accumulated radiation. Moreover, interventional medical resources are scarce in remote areas.
The system allows physicians to remotely steer the magnetic guidewire, quickly select the correct path through complex vascular bifurcations, and reach the target site, effectively reducing radiation exposure of physicians and supporting for remote areas.
It was proposed based on adequate modeling and trajectory planning methods. The researchers attached a section of magnetic hydrogel material to the tip of the guidewire to make the medical interventional guidewire magnetically responsive, allowing it to be flexibly steered under an external magnetic field and provide feedback on its position via an imaging system.
Combining dipole model and Cosserat-rod model, they created continuum mechanics model to predict the tip deformation of guidewire. Meanwhile, the trajectory planning algorithm was developed to obtain the positional trajectory of external magnet and propulsion speed of the advancer to realize autonomous control based on vascular pathway.
Furthermore, they confirmed that the proposed model could predict and reconstruct nonlinear deformation of the guidewire tip through magnetic field characterization and steering characterization experiments.
"We realized autonomous control of the magnetic guidewire. It was controlled by a magnetic field to reach the four target locations of the middle cerebral artery from the puncture point through four different paths in a 3D vascular phantom according to the known vascular paths, and the arrival time was less than two minutes," said Prof. XU.
The physicians could remotely control the magnetic guidewire through the right internal carotid artery of the vascular phantom to reach the target location under real-time guidance of digital subtraction angiography imaging outside the operating room, and the whole process took about two minutes.
In the future, the researchers will continue to study the intelligent control of MCGRS to help physicians perform interventional procedures more efficiently and safely.
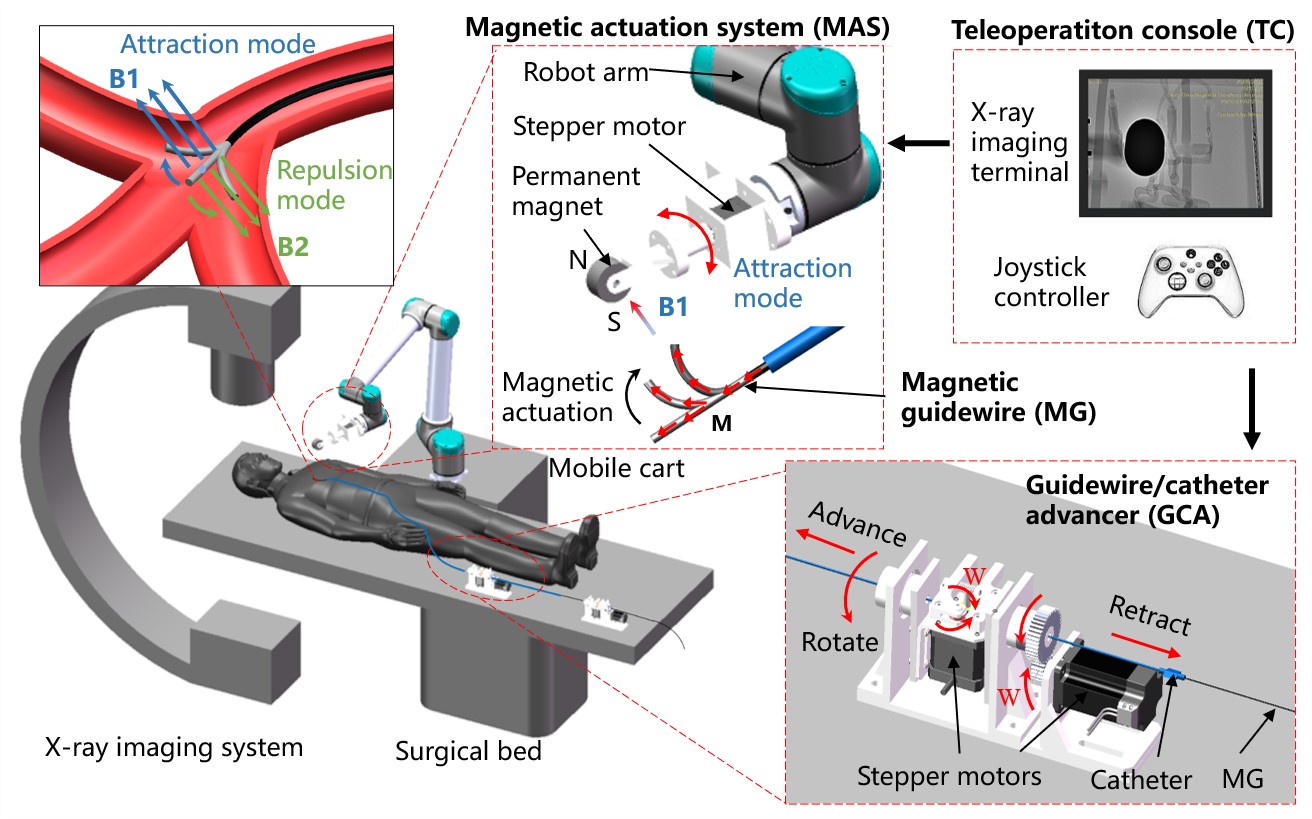
Schematic diagram of interventional surgery and the proposed magnetically controlled guidewire robot system (MCGRS). (Image by SIAT)

86-10-68597521 (day)
86-10-68597289 (night)

52 Sanlihe Rd., Xicheng District,
Beijing, China (100864)
Copyright © 2002 - Chinese Academy of Sciences











