Newsroom





Under common circumstances, when operators manipulate an explosive ordnance disposal (EOD) robot to perform tasks, they mainly rely on the feedback data of the sensors such as camera outfitted on the robot, to conduct on-site situation analysis and grabbing operations.
However, the camera usually has a limited viewing angle and is easily blocked by buildings and ruins. It is not possible to perform full view observation and analysis on the disaster site, and the operation efficiency is relatively low.
In order to improve the working efficiency and capability of the EOD robot, recently, a research team led by Ting WANG at Shenyang Institute of Automation of the Chinese Academy of Sciences proposed a target tracking method for Unmanned Aerial Vehicle (UAV) that can be used in air-ground system, under which an UAV and an EOD robot can work collaboratively.
Within the designed air-ground collaborative working system, a UAV is mounted on an EOD robot and can take off at a click when needed. The UAV can also track the EOD robot in real time for collaborative flight, providing a third perspective for the EOD robot.
Meanwhile, operators can remotely control the UAV to conduct active target search, environment analysis, and can provide a third angle of view for assisting in the operation.
When finishing the task, the UAV can return automatically, and accurately land on the EOD robot platform and then return with the EOD robot.

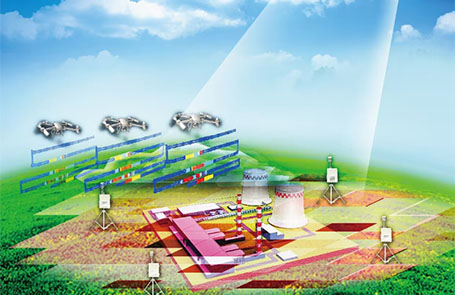
The air-ground collaborative working system (Photo provided by Ting WANG)