
Newsroom





The magnetic microrobot with miniature size and the ability swimming in the liquid with low Reynolds number is promising in targeted therapy since it can move in a narrow environment flexibly.
However, due to the impacts of the nonlinearity and diversity of the desired complex trajectories, it is a challenge to guarantee the microrobot tracking accuracy without frequent controller adjustment.
Recently, a research team led by XU Sheng and XU Tiantian from the Shenzhen Institute of Advanced Technology of the Chinese Academy of Sciences has developed a new method based on broad learning system (BLS), which can realize accurate and flexible trajectory tracking of microrobot.
The study was published in IEEE Transactions on Cybernetics on Nov. 1.
Compared with the traditional deep learning method, BLS, featured with flexible and simple structure, could achieve satisfactory accuracy.
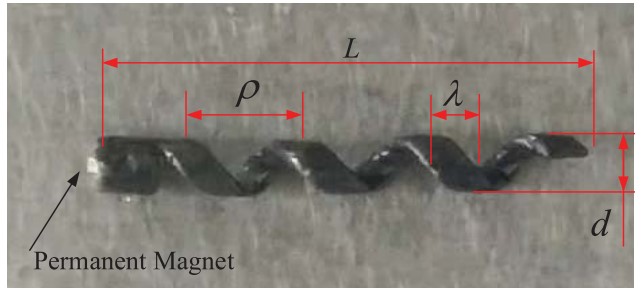
Miniature magnetic helical microrobot (Image by SIAT)
The research team developed a learning-based microrobot servo control algorithm using BLS, and combined the Lyapunov theory with the complex learning method to derive the controller parameters' constraints.
They also developed a BLS-based controller training algorithm that uses multiple desired tracking trajectories as demonstrations, and obtained the controller parameters by the training algorithm.
According to the simulation and experimental results, this BLS-based method had a fast training speed, which only took about 6 seconds.
The trained BLS-based controller can track the trajectories with different shapes and velocities with better accuracy, and it needs no parameter re-adjustment due to its strong ability of generalization. Furthermore, since the BLS method is applied, the number of nodes can be flexibly adjusted when new demonstrations are required.
