
Newsroom





Flexible tactile sensor has great potential in the fields of electronic skin, intelligent robot, wearable and implantable physiological monitoring and treatment. In most previous reports, flexible tactile sensors mainly distinguish surfaces with largescale differences in roughness by comparing the amplitude differences of induced resistance changes. Therefore, it is still a challenge to distinguish the surfaces with microscale roughness difference.
Motivated by such a challenge, a research team led by Prof. ZENG Xiangqiong at the Shanghai Advanced Research Institute of the Chinese Academy of Sciences reported a novel flexible piezoresistive sensor with graphene-PDMS (polydimethylsiloxane) microspheres for microstructure perception. The results were published in ACS Applied Materials & Interface.
According to the researchers, the flexible tactile sensor was inspired by the texture of human finger and to enable the detection of different surface roughness via the processing of tactile signal, suggesting broad application prospects of flexible tactile sensors in wearable devices.
Designed to mimic the fingerprint of human finger, the sensor has similar functions to human skin and is able to distinguish between surfaces with minor differences.
The results show that the sensor has high sensitivity in monitoring the surface of stainless steel with different topography, and can accurately distinguish the surface topography. The wind load experiment results show that the sensor can effectively respond to gas and other fluids.
The sensor presents excellent sensing capability with short response time (60 ms), high sensitivity (up to 2.4 kPa-1 at a low pressure) and excellent cycle stability.
This research extends sensor technology not only to electronic skin, but also to other applications, such as airflow monitoring and packaging for unmanned underwater vehicles.
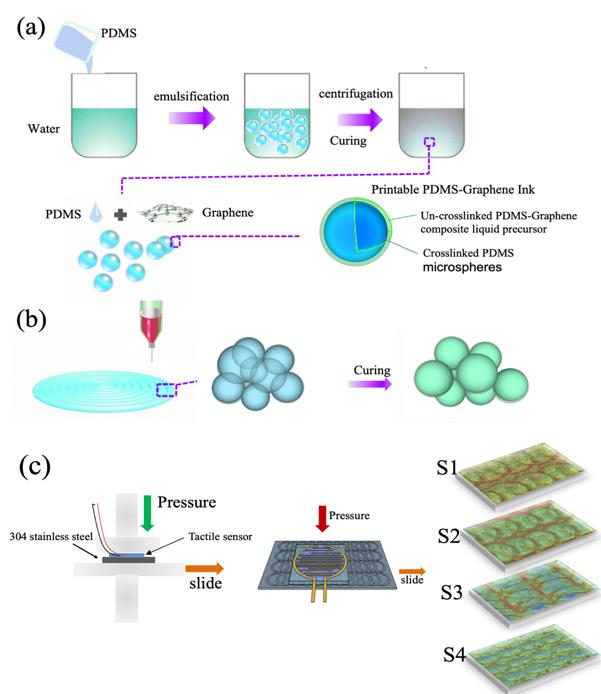
Tactile sensor design principle and printing procedure. a. the conceptual diagram of the entire process of preparing PDMS-graphene composite inks; b. schematic diagram of the printing process of the sensor layer; c. schematic diagram of distinguishing surfaces with different roughness by processing tactile signals. (Image by SARI)

